



Häzirki zaman awtomatlaşdyrylan gaplama önümçilik liniýalarynda netijelilik, takyklyk we dowamlylyk ösüşiň altyn standartydyr. Önümi gaplamakdan we takyk robot palletleşdirmeden başlap, aýlanýan stollarda takyk ýygnamaga we ýokary tizlikli sortlaýyş ulgamlarynda akylly identifikasiýa çenli her bir proses çäklendirilmedik hereketi talap edýär. Şeýle-de bolsa, bu esasy kynçylygy döredýär: 360° aýlanýan bölekler bilen hereketsiz maşyn gurluşynyň arasynda güýji, dolandyryş signallaryny we ýokary tizlikli maglumatlary nädip durnukly geçirmeli?
Geçirijilikli sürgülü halkalar bu meseläni çözýän "sessiz merkez" we "energiýa köprüsi" bolup durýar. Takyk elektromehaniki bölek hökmünde, olar hereketsiz we aýlanýan gurluşlaryň arasynda elektrik baglanyşygyny ajaýyp üpjün edýär we energiýanyň we maglumatyň üznüksiz akymyny üpjün edýär. Olar tutuş awtomatlaşdyrylan gaplama liniýasynyň netijeli we üznüksiz işlemeginiň esasy binýadydyr.
1. Geçiriji süýşme halkalarynyň işleýiş prinsipi we esasy gymmaty
Ýönekeý söz bilen aýdylanda, geçirijilikli süýşme halkasy iki bölekden ybarat: aýlanýan bölek bilen baglanyşykly rotor we hereketsiz gurluş bilen baglanyşykly stator. Onuň esasy prinsipi, üznüksiz aýlanma wagtynda elektrik geçirijiligini dowam etdirmek üçin takyk halka ýoly bilen süýşme gatnaşygynda gymmat bahaly metal garyndysyndan ýa-da süýümli çotgalary ulanmakdyr.
Awtomatlaşdyrylan gaplama ulgamynda onuň esasy gymmaty şu aşakdakylardan ybarat:
- Hereket çäklendirmelerinden azatlyk: Enjamlara kabelleriň dolaşmagy ýa-da burulmagy barada alada etmezden, köp aýlaw üçin çäksiz, üznüksiz aýlanmany amala aşyrmaga mümkinçilik berýär.
- Signalyň bitewüligini üpjün etmek: Serwo motoryň güýjüniň, sensor signallarynyň, görüş kamerasynyň maglumatlarynyň, pnewmatiki dolandyryş signallarynyň we başgalaryň durnukly geçirilmegi takyk dolandyryşy üpjün edýär.
- Enjamlaryň ygtybarlylygyny ýokarlandyrmak: Kabelleriň üzülmegi sebäpli işden çykmalaryň öňüni almak, enjamlaryň ömrüni ep-esli uzaltmak we tehniki hyzmat çykdajylaryny azaltmak.
2. Açar gaplama enjamlarynda süýşýän halkalaryň ulanylyş ssenarileri
1. Örtmek Maşynlary: Çäksiz Aýlanmanyň Goragçysy
Örtük maşynlary paletlenen harytlaryň daşyna plýonkany takyk we deň derejede örtmeli. Olaryň esasy hereketi aýlanýan stoluň üznüksiz aýlanmagy we plýonka arabasynyň dik hereketi. Sürüşýän halkalar, adatça, aýlanýan aýlanýan stoluň aşagynda gurnalýar we aýlanýan stoluň fotoelektrik datçiklerine (ýüküň beýikligini anyklamak üçin) güýç we dolandyryş signallaryny bermek üçin jogapkärdir, serwo sürüji ulgamlarynda we mümkin bolan ýokarky basyş gollarynda. Sürüşýän halkalar bolmasa, aýlanýan plastinka diňe çäklendirilen aralykda aýlanyp biler, bu bolsa netijeli we takyk örtmegi mümkin däl edýär.
Häzirki wagtda müşderilerimiz tarapyndan iň köp ulanylýan sürüşýän halkalar standartdyr25 mmiçki diametri we38mmiçki diametrli deşik arkaly süýşürilýän halkalar. Şeýle hem, standart içki diametrleri bolan gaplama enjamlaryny ulanýan müşderilerimiz bar60 mm, 70 mm, ýa-da80 mm.
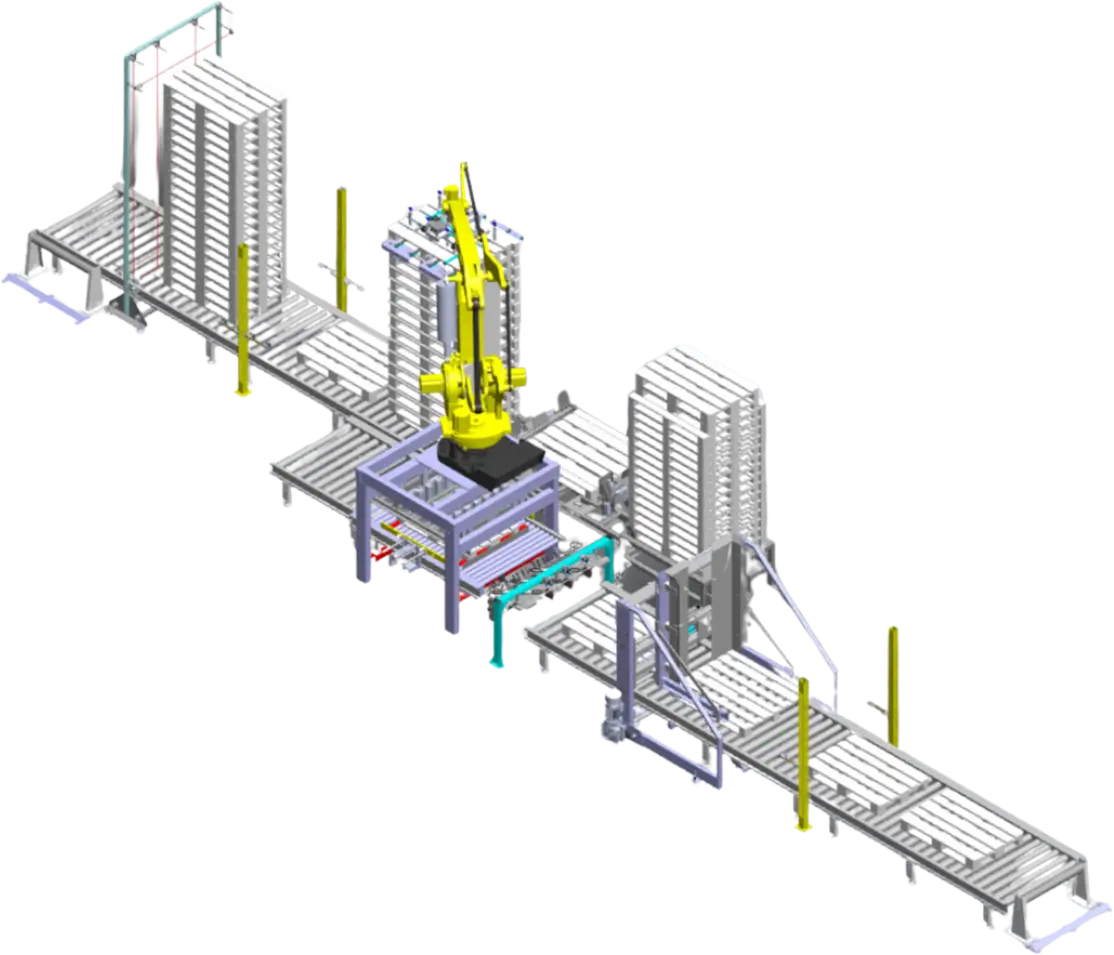
2. Robot palletizatorlary: Tans edýän energiýa birleşdirijileri
Bogunly robot palletizatorlary gaplama liniýalarynyň ýyldyzlarydyr. Olaryň "gollarynyň" çeýe hereketi her bir bogunda takyk aýlanmaga baglydyr. Kompakt, köp kanally süýşýän halkalar köplenç robotyň binýadyna ýa-da esasy bogunda birikdirilendir. Olar bogunyň serwo motorlaryna güýç berýär, şeýle hem liniýanyň ujundaky tutujydan (meselem, wakuum käse ýa-da robot barmak ýaly) tutujy signallary, basyş datçiklerinden maglumatlary we islendik birleşdirilen görüş pozisiýasyny kesgitleýän kameradan maglumatlary geçirýärler. Süýşýän halkalaryň işi robotyň hereketleriniň ýumşaklygyny, tutujylygyň takyklygyny we umumy iş kadansyny gönüden-göni kesgitleýär.
TheDHK deşik arkaly geçirilýän seriýaly geçirijilikli sürgülü halkalarweEthernet seriýaly geçirijilikli sürgülü halkalarIngiant tarapyndan işlenip düzülen enjamlar dürli robot gollarynda giňden ulanylýar.


3. Aýlanýan gurnama stoly/köp stansiýaly aýlanýan stol: Netijeli hyzmatdaşlyk üçin dolandyryş merkezi
Doldurmak, gaplamak, etiketkalamak we karton gaplamak ýaly proseslerde köp stansiýaly aýlanýan ýygnaýyş stoly önümçiligiň netijeliligini ýokarlandyrmak üçin möhümdir. Stol wagtal-wagtal aýlanýar, her bir stansiýa hereketsiz wagty belli bir operasiýany ýerine ýetirýär. Aýlanýan stoluň merkezinde oturdylan geçirijilik halkasy "merkezi dolandyryş merkezi" hökmünde hereket edýär, köp stansiýalardaky pnewmatik solenoid klapanlaryna (dolandyryjy silindrlere), elektrik otwýortkalaryna, datçiklerine we görkeziji çyralaryna güýç we signallar berýär. Bu bolsa, ähli stansiýalardaky hereketlendirijileriň aýlanma prosesinde hemişe taýýar bolmagyny we esasy dolandyryş ulgamy bilen real wagt aragatnaşygyny saklamagy üpjün edýär, bu bolsa takyk sinhronizasiýany üpjün edýär.
Aýlanýan ýygnamak stollary, esasanam, ýokary takyklygy talap edýän sürüşýän halkalar üçin amatlydyr (süýümli optika, ýokary tizlikli elektrik geçirijisi), dinamiki şertler (aýlanma wagtynda durnukly geçirijiligi talap edýär) we çylşyrymly gurluşlar (köp kanal, uly ölçegler). Olaryň esasy gymmaty gözegçilik edilýän aýlanyş gurşawy arkaly ýygnamagyň netijeliligini we takyklygyny ýokarlandyrmakda, şol bir wagtyň özünde soňraky işe girizme çykdajylaryny azaltmakda durýar.
4. Awtomatlaşdyrylan sortlama ulgamlary: Maglumatlar daşgynlygyna öwrülýän geçelgeler
Ýokary tizlikli awtomatlaşdyrylan sortlaýyş ulgamynyň, mysal üçin, çarpaz guşakly sortlaýjynyň özeni, ýüzlerçe arabanyň paketleri paýlanýan ýokary tizlikli aýlanýan halkadyr. Her araba garaşsyz intellektual birlik bolup, onuň guşak motoryny herekete getirmek üçin güýç we merkezi dolandyryş ulgamy bilen aragatnaşygy talap edip biler. Syrylan halkalar bu ýerde "maglumat geçelgesi" hökmünde hereket edýär. Sortlaýjynyň ägirt uly aýlanýan platformasynyň merkezinde durup, olar hereketsiz dolandyryş konsoly bilen ähli hereket edýän arabalaryň arasynda güýç we ýokary tizlikli maglumat kanalyny döredýärler, bu bolsa köp mukdarda sortlaýyş maglumatynyň päsgelçiliksiz akymyny üpjün edýär we minutda haýran galdyryjy derejede ýokary sortlaýyş tizligine ýetýär.
Awtomatiki sortlaýyş ulgamlary üçin sürüşme halkalarynyň saýlanyşy geçirijilik görnüşi bilen utgaşdyrylmalydyr (elektrik/optik/suwuklyk), aýlanma tizligi, kanallaryň sany we daşky gurşaw talaplary. Adatça, mikro ýokary tizlikli geçirijilikli süýümli halkalar, optiki süýümli süýümli halkalar, pnewmatiki suwuklykly süýümli halkalar we gibrid integrasiýaly süýümli halkalar saýlanýar.

3. Saýlama we tehniki hyzmat: Öndüriş liniýasynyň üznüksiz işlemegini üpjün etmek
Awtomatlaşdyrylan gaplama enjamlary üçin dogry sürgülü halkany saýlamak örän möhümdir. Kanallaryň sanyny (tok, signal we gaz/suwuklyk), tok we naprýaženiýe derejelerini, aýlanma tizligini, IP derejesini we signalyň päsgelçiliklere garşy immunitetini (Ethernet we CAN şin signallary üçin gorag ýaly).
Ýokary hilli sürgülü halkalar örän uzak hyzmat möhletini we minimal tehniki hyzmaty hödürleýär. Çotgalaryň aşynmagyny yzygiderli barlamak we içki arassaçylygy saklamak (esasanam gaplama sehiniň tozanly gurşawynda) uzak möhletli we durnukly işlemegi üpjün etmegiň möhüm açarydyr.
Netije
Enjamlaryň içinde gizlenip, seýrek görünýän hem bolsa, sürüşýän halkalar häzirki zaman awtomatlaşdyrylan gaplama önümçilik liniýalary üçin möhüm mümkinçilik döredýän tehnologiýadyr. Olar çäksiz aýlanmak, akylly gözegçilik we netijeli hyzmatdaşlyk üçin fiziki binýady emele getirýär. Sarmakdan we palletleşdirmekden başlap, ýygnamaga we tertiplemäge çenli, sürüşýän halkalar sessiz hyzmatdaş ýaly hereket edýär, awtomatlaşdyrylan enjamlar bilen sazlaşykly hyzmatdaşlyk edip, häzirki zaman senagat gaplamalarynyň netijeliligini we takyklygyny özünde jemleýär we akylly önümçilikde innowasiýalary we ösüşi yzygiderli öňe sürýär.
Ýerleşdirilen wagty: 2025-nji ýylyň 29-njy awgusty